Risk-bounded Motion Planning and Control in Confined Dynamic Environment
Abstract:
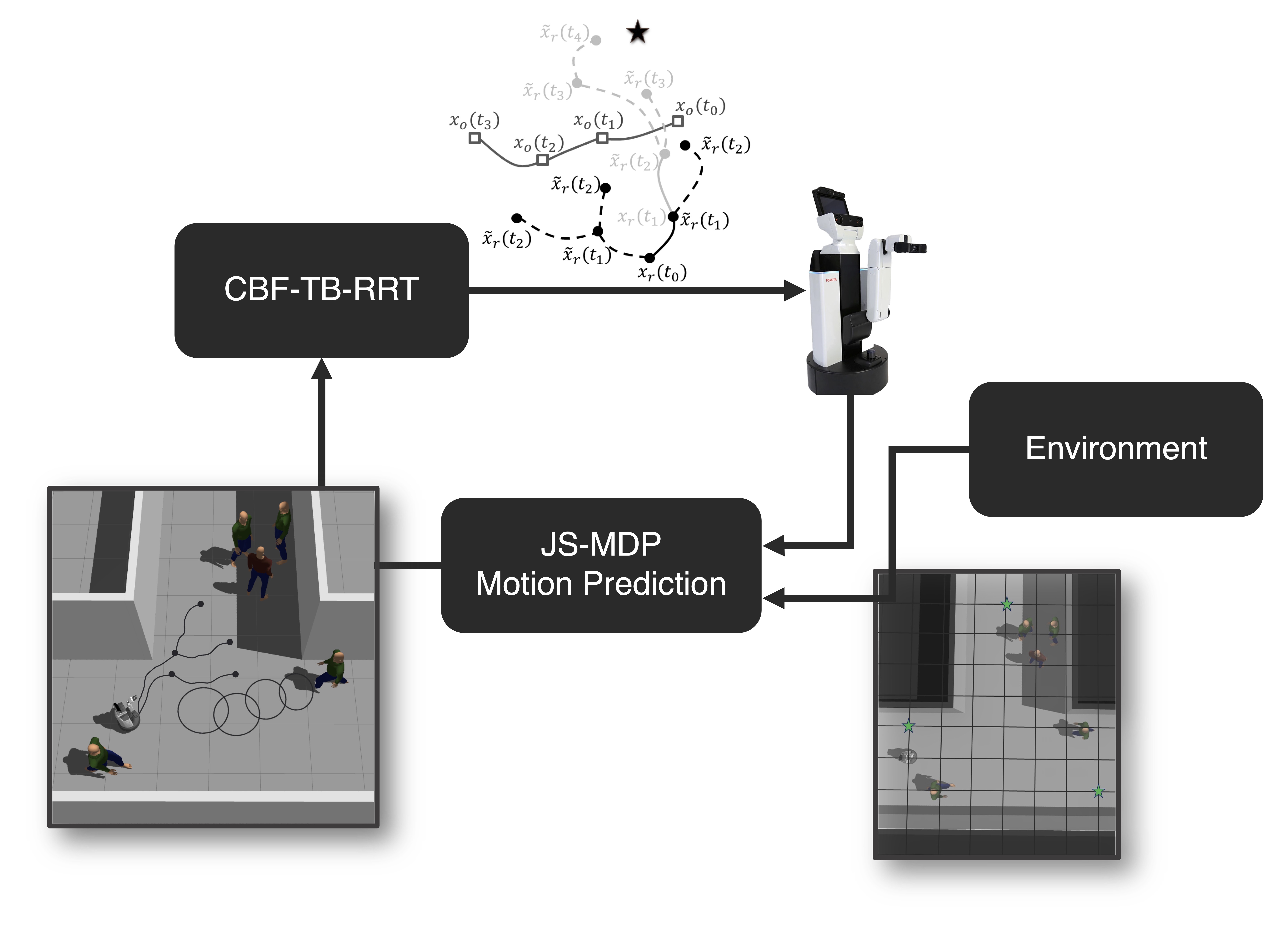
Sampling-based methods such as Rapidly-exploring Random Trees (RRTs) have been widely used for generating motion paths for autonomous mobile systems. In this work, we extend time-based RRTs with Control Barrier Functions (CBFs) to generate, safe motion plans in dynamic environments with many pedestrians. Our framework is based upon a human motion prediction model which is well suited for indoor narrow environments. We demonstrate our approach on a high-fidelity model of the Toyota Human Support Robot navigating in narrow corridors. We show in three scenarios that our proposed online method can navigate safely in the presence of moving agents with unknown dynamics.
Publications
IROS'21
Safe Navigation in Human Occupied Environments Using Sampling and Control Barrier Functions
K. Majd, S. Yaghoubi, T. Yamaguchi, B. Hoxha, D. Prokhorov, and G. Fainekos
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021. BibTexL-CSS'20
Risk-bounded Control using Stochastic Barrier Functions
S. Yaghoubi, K. Majd, G. Fainekos, T. Yamaguchi, D. Prokhorov, and B. Hoxha
IEEE Control Systems Letters. BibTex